第四章 關於 PID控制
1. 前言
上一章已介紹時間比例、連續比例、位置比例的3種控制方法。接著,本章將說明該控制方法最常用的PID控制(P: 比例、I:積分、D:微分)。基本上,PID控制是指釋出與當前值 (PV) 和設定值 (SP) 的偏差呈比例的輸出比例動作(Proportional Action:P動作)、釋出與該偏差積分呈比例的輸出(Integral Action:I動作)以及輸出與偏差微分呈比例的微分動作(Derivative Action:D動作)的和,以朝向目標值進行控制。
首先,分別說明比例、積分與微分各自的動作。
2.關於比例動作
比例動作(P動作)是指在比例帶內,運作與當前值和設定值的偏差呈比例的操作量動作。依裝置而異的比例帶標準約為2~10%。
然而,在僅有P動作中,會發生如下所述的穩態誤差(殘留偏差),因此除了I(積分)動作,一般還會進行消弭設定值間偏差的控制。
3.何謂穩態誤差(offset)?
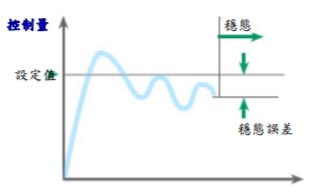
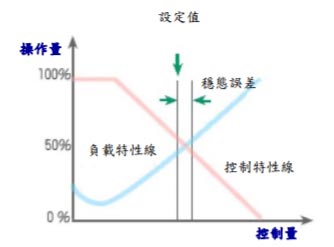
如圖1所示,所謂穩態誤差是指設定值和當前值之間的偏差為恆定值,會永續性的持續。若僅以比例動作進行控制時,會依負載的變動和裝置的固有特性而出現穩態誤差,而如圖2所示,負載特性和控制特性線的交點,必為與設定值不一致的原因。
以下將具體說明,會以何種情況出現穩態誤差。
(1)負載發生變化時
相較於理想條件,若施加較大負載時,會因此負載而增加被奪取的熱量,檢測溫度將於低於設定值處穩定。反之,若放入負載較小的物體時,則發生相反情況,檢測溫度呈現較高的情況。
(2)裝置的環境溫度變化時
冬天會因裝置的環境溫度較低,而增加被奪取的熱量,因此檢測溫度會低於設定值。反之,夏季等環境溫度較高時,因被奪取的熱量較少,因此檢測溫度會高於設定值。
(3)如有變更設定值時
例如在設計為800℃之用的燃燒爐中,若設定的設定值高於800℃時,檢測溫度即低於設定值;若設定的設定值低於800℃時,檢測溫度即高於設定值。
4.手動重整(手動修正設定值)
承如前述,在僅以比例動作進行的控制中,無法避免穩態誤差。於是,在消弭穩態誤差的方法上,則有手動重整(ManualReset)或積分動作的功能。
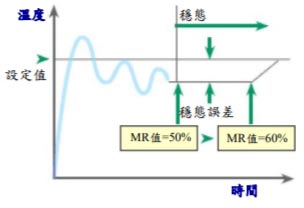
所謂手動重整是指在現場調整溫度調節器輸出結果的功能,如圖3所示,當穩態誤差處於設定值的下方時,則設定高於50%。
因此,透過手動調整的手動重整,適用於一年僅需調整數次的情況,當負載頻繁變動時,即適合以下說明的積分動作。
5.積分動作
積分動作(I動作),適當出現穩態誤差時改變操作量,做出等同手動重整一般消弭穩態誤差的動作。
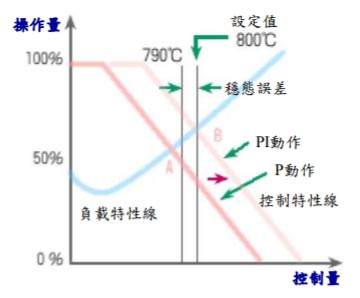
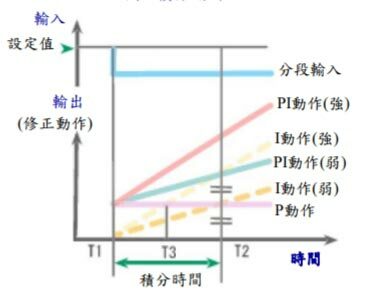
如圖4所示,以上述狀態來說,P動作的控制特性線和負載特性線,是以交點A為平衡,操作量則呈60%。接著,加上I動作而運作PI動作時,會隨時間持續輸出,以便讓控制特性線朝右方平行移動,並在控制特性線和負載特性線剛好等於設定溫度的交點B上達成平衡。
(1)積分動作
如有偏差時,若啟用I動作,就會根據該大小,而以恆定速度改變調節器的輸出,並繼續進行輸出,直到該偏差已完全消失為止。
(2)積分時間的定義
PI動作的調節器為時間T1時,當施加如圖5所示的分段輸入(step input)時,依P動作改變的輸出部分和依I動作改變的輸出部分,相等的時間T1-T2,為積分時間。
(3)積分時間和修正時間
比較積分時間長度,長的時間(T1-T2)和短的時間(T1-T3),時間較短的部分,會施加強力積分,而在短時間內運作大的修正量,而得以在短時間內修正偏差。然而,需要注意的是,積分時間設定過短時,容易引起追逐現象,而無法獲得穩定的控制結果。標準約為100~150秒。
6.微分動作
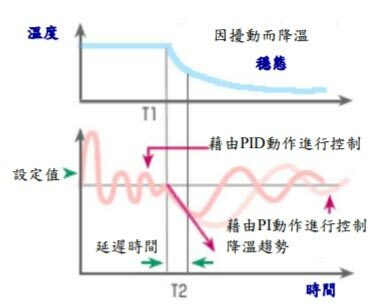
微分動作(D動作)是指因外亂等因素而檢測溫度開始改變時,視該變化程度,趁偏差較小的時候,施加大幅修正動作,以防止結果發生極大波動的一種動作。
如圖6所示,當溫度感測器檢測到室溫下降時,調節器便隨著逐步釋出修正輸出,但溫度感測器發生應答延遲時即形成延遲時間(T1-T2),因調節器僅追隨延遲時間進行修正,而讓室溫下降至極低位置。
在此運作微分動作後,可偵測溫度的下降趨勢(每單位時間的溫度變化分),並在事先預設下降溫度之下,釋出大幅的修正輸出。因此不會大幅降低室溫,而得以立即穩定原始溫度。
以下將具體說明動作。
(1)微分動作
微分動作是指,當溫度開始下降時,由調節器判斷其趨勢(溫度變化的部分)後,再輸釋出相應的修正輸出,以抑制溫度驟變的一種動作。
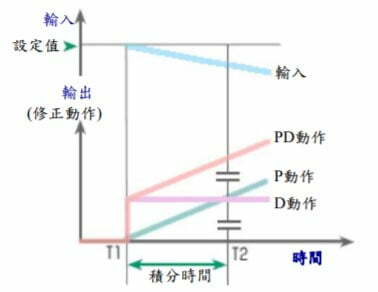
(2)微分時間的定義
如圖7所示,在時間T1時連續性輸入,且以一樣的速度進行變化後,依照P動作輸出的變化量和依照D動作輸出的變化量相等於時間T2時,所經過的時間T1-T2即稱為微分時間。
(3)微分時間和修正時間
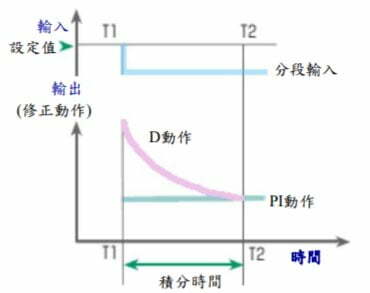
如以下圖8所示,在時間T1施加分段輸入後,P動作輸出即變化成步階狀,D動作在瞬間呈最大輸出,當偏差為一定時,便立即開始減衰輸出。
此時間T1-T2為微分時間,當微分時間越長,微分作用越強。和積分時間一樣,若將微分時間設定的過長,即便是微小的變化也會釋出大輸出,而產生追逐現象,且無法穩定控制性。雖然會依裝置而異,但標準的微分時間約為10~50秒。
7.PID自動微調
要計算出PID最佳值需要豐富的經驗和知識,目前的調節器幾乎都搭載了可輕鬆求出PID最佳值的自動微調功能。
然而,這種自動微調也會依裝置和環境情況,而不一定能求出最佳值,此時就需仰賴人工修正。因此近年來已經推出,為了在盡可能不借用人力之下求出最佳值,而具備學習功能或模糊推論 (fuzzy inference)的自動微調,或由調節器隨時監視控制對象,以執行適應控制的自調諧(self-tuning)等系統。
本次,將在此說明自動微調的基本原理。
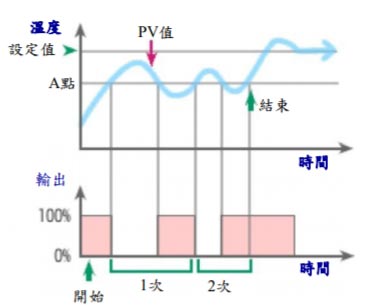
如圖9所示,首先在執行自動微調後,調節器會讓當前值(PV值)接近設定值,並在設定值附近的A點,重複進行2次調節器的輸出0%→100%→ 0%→100%循環。
測量此時的PV值波形振幅和週期(延遲時間期),以演算最佳PID值後,將演算值儲存於調節器,即可進行穩定的控制。
8.彙總
隨著近年來軟體日新月異的進步,在調節器上也開始搭載支援各種應用程式的功能,而得以執行最佳控制。然而,控制迴路是由發揮調節器功能的控制部、測量溫度或壓力的感測器部以及閥門與馬達等操作部所構成,在各自巧妙的組合下獲得穩定的控制結果。
近年來,除了構成控制迴路的感測器部、控制部、操作部之外,就連支援使用者簡單操作及簡單維修需求的人機介面也日益重要。因此往後的控制不只需要感測器部、控制部、操作部的巧妙組合,考量是否採用含有使用者易用性與維修性的人機介面控制迴路也很重要。


